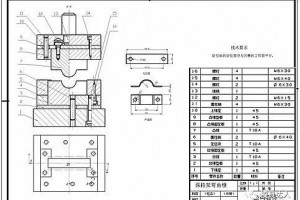
滑块联轴器是一种可移动式联轴器,又称补偿式刚性联轴器,其结构特点是能够连接中心线不重合的两根轴,并使中心线不重合的两根轴具有同向且相等的角速度。本任务进行滑块联轴器的造型与仿真过程,并通过给半联轴器与滑块之间添加碰撞和滑动副两种形式,验证从动副经过滑块联轴器的速度传递可以得到和主动轴同向且相等的角速度。滑块连轴器如下图所示。
-滑块联轴器工作模拟") 一、零件造型
一、零件造型1. 机架 绘制机架草图,如下图所示,然后拉伸,厚度为20mm
在拉伸体端面添加如下草图,然后拉伸,拉伸参数如下:
在拉伸体上表面绘制如下草图,拉伸切除,深度为10mm
最后结果如下:
2. 活动机架 活动机架草图如下,然后拉伸,厚度为20mm
3. 半联轴器 半联轴器尺寸如下,拉伸,厚度为40mm
在其端面插入草图,尺寸如下,然后作切除拉伸,深度为20mm
在拉伸体的另一端,然后拉伸,厚度为25mm
继续添加草图,然后拉伸,厚度为35mm
最后结果如下图所示:
4. 滑块滑块尺寸如下图所示,然后拉伸,厚度为20mm
在其端面插入草图,尺寸如下,然后作切除拉伸,深度为20mm
再在此端面插入草图,尺寸如下图所示:
然后拉伸,参数如下:
最终得到滑块的造型,如下图所示:
二、构建装配模型三、运动仿真1.进行三维碰撞接触状态模拟,给出半联轴器2的转速曲线。2.生成gif动画



 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号