机械运转过程中,当工作阻力或驱动力发生突变时,会使输入能量与输出能量在较长的一段时间内失去平衡,产生非周期性的速度波动,若不加以调节,会使系统的转速持续上升或下降,严重时将导致飞车或停止转动。为避免这种情况,必须对速度进行调节。
-离心调速器工作模拟")
离心调速器工作原理如上图所示:立轴与系统相连,当系统的转速过高时,立轴带动调速器的分球转动,离心力使飞球张开,带动轴环旋转并向上移动,轴环带动轴套向上移动,节流阀向下,使管道开启度减小,使进入原动机的工作介质减少,立轴转速下降。反之,当转速过低时,节流阀开启增大,进入原动机的工作介质增多,使系统的转速增加,从而调节系统的转速。
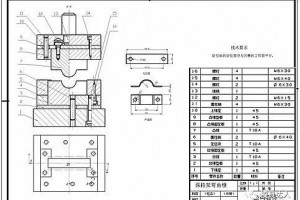
一、零件造型1.横杆、连杆、臂杆 横杆尺寸如下:
退出草图,拉伸厚度为5mm,结果如下:
臂杆尺寸如下:
拉伸长度为5mm,结果为:
连杆1、连杆2、连杆3的尺寸分别如下,拉伸厚度均为5mm
连杆4尺寸同连杆2,如下:
2、飞球创建飞球,直径为50,圆心选择工件坐标系原点。选择【格式】/【WCS】/【原点】,在弹出的对话框中输入数值,改变工件坐标系原点位置。
创建一长方体,输入数值,布尔操作选择求和
在长方体上作切除拉伸,拉伸深度为10,草图及结果如下:
3、立轴 首先得到圆柱体,直径为30mm,高度为250mm 在圆柱体端面绘制草图如下,然后作切除拉伸,给定深度为15mm,结果如下:
4. 轴环与轴套首先得到一圆柱体,直径为40mm,高度为30mm,然后构造另一圆柱体,直径为20mm,高度为30mm,做布尔差运算。在圆柱体轴心线的平面插入草图,尺寸如下
然后镜像草图:
退出草图,双向拉伸,距离为5mm,结果如下图所示
轴套与轴环尺寸相同,只是少了镜像
5、节流阀与管道节流阀草图如下,然后做拉伸,深度为5mm
构建圆柱体,直径为25mm,高度为100mm,再次构造以圆柱体,直径为10mm,高度为100mm,然后作布尔差运算。在拉伸体端面上绘制如下草图,拉伸切除,给定深度为15mm,得到实体如下:
二、构建装配模型三、运动仿真 1. 立轴转速设定为30r/min,图表显示节流阀和管道所形成的滑动副的位移。 2. 立轴转速设定为90r/min,图表显示节流阀和管道所形成的滑动副的位移。 3. 立轴转速设定为325r/min,图表显示节流阀和管道所形成的滑动副的位移。 4. 生成各种状态下的gif动画



 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号