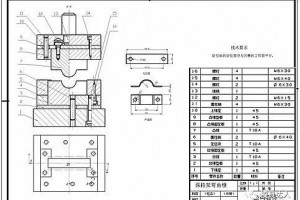
1.连杆1—500*10*20的长方体,俩端倒R10及¢10*2孔如图:

2. 连杆2---20*10*80的长方体,俩端倒R10,凸台2-¢10*10(高10)如图:
3.连杆3---200*10*20的长方体,俩端倒R10及¢10*2孔如图:
4.滑块—50*40*30的长方体,30*40的面上放置腔槽20*10*50;40*50的面上放置¢10*高10的凸台如图
二、装配。新建部件文件,注意单位mm
三、动画1.应用—运动--- 方案浏览器 –master –右键---新方案—取消连杆/刚体--定义连杆,连杆1固定,依次定义序号为001到004,每次选“应用”最后“取消”
2.运动副—旋转副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选恒定的,速度给1000/第二连杆选连杆2/应用
同理,运动副—旋转副—第一连杆选连杆2/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选连杆3/应用上图右 同理,运动副—旋转副—第一连杆选连杆3/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选滑块/应用
3.滑块的运动运动副—滑动副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+X)/ 运动驱动选否/第二连杆选滑块/应用
5. 动画上图右时间,步数改好 确定6.运动
7. 动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OK二、俩滑板的运动滑板---500*80*101.先装配好
2.应用—运动--- 方案浏览器 –master –右键---新方案—取消3. 连杆/刚体—定义滑板1(固定)--应用--定义滑板2---应用上图右4.运动副—滑动副—第一连杆选滑板1/ 过滤器选点,再选矢量(X)/ 运动驱动选恒定的,速度给100---第二连杆选滑板2/应用5. 动画
时间,步数改好确定6.运动
7. 动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OK



 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号