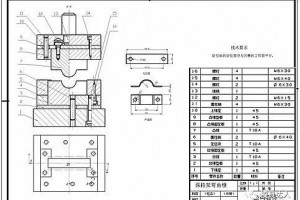
【任务】 完成如图 1.1所示脚轮的装配。

图 1.1 脚轮【知识点】(1)添加组件;(2)添加装配约束。【实例文件】
chajia.prt、dianquan.prt、lunzi.prt、xiao.prt、zhou.prt、assy_jiaolun.prt 【操作步骤及要点】(1)新建部件文件。①选择【文件】|【新建】命令,弹出【新建】对话框,在【名称】文本框中输入“assy_jiaolun”,设置【单位】为【毫米】,其余保持默认设置。②单击【确定】,进入建模环境。③选择【开始】|【装配】命令,进入装配环境,系统界面下方出现【装配】工具条,如图 1.2所示。
图 1.2 装配工具条
装配文件的单位与零部件的单位要一致,否则有些操作如【设为工作部件】不能进行。 由于采用的是虚拟装配,装配文件并没有包括各个部件的实际几何体数据,因此各个零部件文件应与装配文件在同一个目录下,否则再打开装配文件时将很容易出错。 (2)添加叉架。①单击装配工具条上的【添加组件】图标
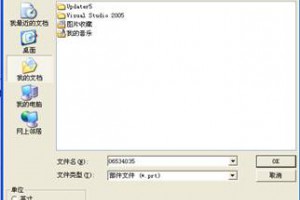
,弹出【添加组件】对话框,如图 1.3所示。②单击【打开】图标
错误!不能通过编辑域代码创建对象。,弹出【部件名】对话框。选择“chajia.prt”文件,单击【OK】,弹出【组件预览】窗口,如图 1.4所示。③在【添加组件】对话框中,设置【定位】为【绝对原点】、【Reference Set】为【模型】、【图层选项】为【原先的】,单击【确定】。
图 1.3 添加组件对话框
图 1.4 组件预览对话框(3)固定叉架。①单击装配工具条上的【装配约束】图标
错误!不能通过编辑域代码创建对象。,弹出【装配约束】对话框,如图 1.5所示。②在【类型】下拉选项中选择【固定】,选择上一步添加的叉架,单击【确定】。此时【装配导航器】和图形窗口中都有固定约束的标记,如图 1.6所示。
图 1.5 装配约束对话框
图 1.6 固定叉架
一般情况下,对第一个组件采用【绝对原点】的方式进行定位,其余的组件采用【通过约束】的方式定位。 零件与组件对象的区别:组件对象是指针实体,所包含的几何体的信息小于零件的几何信息。 (4)添加轮子。①单击装配工具条上的【添加组件】图标
,弹出【添加组件】对话框。②选择组件“lunzi”,设置【定位】为【通过约束】、【Reference Set】为【模型】、【图层选项】为【原先的】,单击【确定】,弹出【装配约束】对话框。③在【类型】下拉选项中选择【接触对齐】,选择【方位】为【自动判断中心/轴】,依次选择图 1.7所示的中心线1和中心线2,完成第一组装配约束。④在【类型】下拉选项中选择【中心】,设置【子类型】为【2对2】,依次选择图 1.7所示的面3、面4、面5和面6(面4和面3相对、面6和面5相对),完成第二组装配约束。⑤单击【确定】,完成轮子的定位,结果如图 1.8所示。
图 1.7 选择中心线和面
图 1.8 添加轮子
在装配导航器中,组件lunzi的位置为【部分约束】。通过【移动组件】命令,可以发现螺母还可以绕其中心轴旋转。此处这个自由度的存在是允许的,所以不必再添加其它装配约束。 (5)添加销。①单击装配工具条上的【添加组件】图标
,弹出【添加组件】对话框。②选择组件“xiao”,设置【定位】为【通过约束】、【Reference Set】为【模型】、【图层选项】为【原先的】,单击【确定】,弹出【装配约束】对话框。③在【类型】下拉选项中选择【接触对齐】,选择【方位】为【自动判断中心/轴】,依次选择图 1.9所示的中心线7和中心线8,完成第一组装配约束。④在【类型】下拉选项中选择【中心】,设置【子类型】为【2对2】,依次选择图 1.9所示的面9、面10、面11和面12(面10和面9相对、面12和面11相对),完成第二组装配约束。⑤单击【确定】,完成销的定位,结果如图 1.10所示。
图 1.9 选择中心线和面
图 1.10 添加销
在新约束系统中,圆柱和圆锥部件是使用中心线对齐的。为了使它们的轴共线,请使用【接触对齐】这种约束类型,并从这些部件或特征中选择中心线,而不是使用 NX 5 之前版本中的对齐圆柱/圆锥面这一技术。中心线是自动生成的;它们会在光标移到圆柱或圆锥面的轴上时出现。如果为接触约束选择曲面,则会在这两个曲面之间创建相切条件。 (6)添加垫圈。①单击装配工具条上的【添加组件】图标
,弹出【添加组件】对话框。②选择组件“dianquan”,设置【定位】为【通过约束】、【Reference Set】为【模型】、【图层选项】为【原先的】,单击【确定】,弹出【装配约束】对话框。③在【类型】下拉选项中选择【接触对齐】,选择【方位】为【接触】,依次选择图 1.11所示的面13和面14,完成第一组装配约束。④类型保持不变,选择【方位】为【自动判断中心/轴】设置,依次选择图 1.11所示的中心线15和中心线16,完成第二组装配约束。⑤单击【确定】,完成垫圈的定位,结果如图 1.12所示。
图 1.11 选择中心线和接触面
图 1.12 添加垫圈(7)添加轴。①单击装配工具条上的【添加组件】图标
,弹出【添加组件】对话框。②选择组件“zhou”,设置【定位】为【通过约束】、【Reference Set】为【模型】、【图层选项】为【原先的】,单击【确定】,弹出【装配约束】对话框。③在【类型】下拉选项中选择【接触对齐】,选择【方位】为【接触】,依次选择图 1.13所示的面17和面18,完成第一组装配约束。④类型保持不变,选择【方位】为【自动判断中心/轴】设置,依次选择图 1.13所示的中心线19和中心线20,完成第二组装配约束。⑤单击【确定】,完成轴的定位,结果如图 1.14所示。
图 1.13 选择接触面和中心线
图 1.14 添加轴
装配的一般思路如下: (1)制作各个零部件。 (2)新建一个部件文件,并调用装配模块(一般还应同时调用建模模块)。 (3)将零部件以组件的形式加入。 (4)指定组件间的装配约束。 (5)对于需要参照其他零部件进行设计的零件,采用部件间建模技术进行零部件设计。 (6)保存装配文件。 


 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号