

图片:Felice Frankel
周三在“自然”杂志上发表的一项研究表明,磁控结构是由一个光滑的环组成,这个环可以起皱,一个长管挤压闭合,一张可以折叠的薄片和一个可以爬行的蜘蛛状“抓取器”快速滚动,跳跃,并快速捕捉传球。它甚至可以直接包裹在一个小药丸周围,并将其携带穿过一张桌子。研究人员从一种新型3D打印墨水制造出每种结构,并在其中注入了微小的磁性颗粒。然后,他们在3D打印机的喷嘴周围安装了一个电磁铁,当墨水通过喷嘴进入时,导致磁性粒子摆动成单一方向。通过控制结构中各个部分的磁性取向,研究人员能够生产结构和设备,几乎可以瞬间转变成复杂的地层,甚至可以移动,因为各个部分都会对外部磁场做出响应。
麻省理工学院机械工程系和土木与环境工程系Noyce职业发展教授Xuanhe Zhao说该小组的技术可用于制造磁控生物医学设备。例如,我们可以在血管周围放置一个结构来控制血液的抽吸,或者使用磁铁来引导装置通过胃肠道拍摄图像,提取组织样本,清除堵塞或者将某些药物输送到具体位置。你可以设计,模拟和打印,以实现各种功能。
这种类型的技术被称为软启动装置,水凝胶装置在温度或pH变化时膨胀;形状记忆聚合物和液晶弹性体在充足的刺激如热或光下变形。麻省理工学院表示,这些类型的软启动装置往往响应缓慢,并在数分钟至数小时内改变形状。Kim说:“没有理想的候选人可以在像人体这样的封闭空间里执行软机器人,你可以在这里完成某些任务。这就是为什么我们认为这种磁致动的理念是非常有希望的,因为它快速,有力,身体健康,并且可以远程控制。”
该团队并没有制造出具有相同,均匀取向的磁性颗粒的结构,而是采用不同方向的磁性颗粒排列了各个部分。当暴露于外部磁场时,每个部分应以不同的方式移动,这取决于其粒子响应于磁场而移动的方向。凭借全新的3D打印方法,研究人员可以在打印过程中通过改变环绕打印机喷嘴的电磁铁的方向打印结构的各个部分并调整特定部分中的磁性颗粒的方向。
图片:Felice Frankel
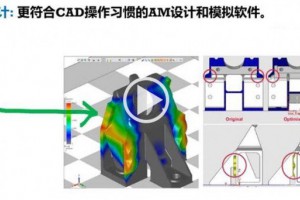
该团队还开发了一种物理模型,用于预测印刷结构在磁场下如何变形。麻省理工学院开发的其他设备包括一组“拉胀”结构,可快速收缩或沿两个方向扩展。他们还印制了一个嵌有电路和红色和绿色LED灯的环,以编程的方式控制亮与灭。人们可以设计自己的结构和领域模式,使用模型进行验证,并打印出来以启动各种功能,磁场的复杂信息可以进行编程,人们甚至可以打印出智能机器人。”
中国3D打印网译自:3ders.org



 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号