
本文介绍了十四条SolidWorks机器人设计的系统建模技巧。
使用 VEXplorer 系统等机器人设计套件无疑有助于构造和装配机器人。然而,如果只凭人力来构思,即使只是构想比较简单的机器人系统,也是一件冗长乏味、绞尽脑汁的事情。就算对于最具想象力的工程师来说,在头脑中构思细节、方位、外壳和间距,也是具有很大的挑战。所以,必须使用 2D 工程图和 3D CAD 模型来直观地表示机器人设计。
不管是学生、爱好者还是以竞赛为目的的机器人团队,都可使用 VEXplorer 系统来构思并建立各种各样的机器人应用,这只受物理规则和想象力的限制。所以,理解 3D 建模的基本概念对于有效地开发机器人系统非常重要。3D CAD 为机器人设计师插上了想象的翅膀,为其提供视觉线索和参考点,助其将想法转化为现实。
组织通过使用 CAD 建模技术,可以在机器人系统的设计、制造和竞争方面持续取得成功。VEXplorer 系统附带提供 SolidWorks® 的 150 天学生设计套件,此套件每天都帮助全球机器人工业的工程师构建成熟的产品。有关使用 SolidWorks 的 3D 建模技术进行 VEX 机器人开发的免费概述和详细的逐步说明可在 www.solidworks.com/VEX 找到。
3D 建模包括三种基本文档:
1. 零件图 – 各个设计部件的 3D 表示
2. 装配图 – 零件和/或其它装配体的 3D 排布
3. 工程图 – 2D 工程图,通常用来表示零件或装配体
这些文档都有助于机器人系统的总体设计。对于机器人设计人员来说,无论年龄和技能水平如何,只要理解了使用 Solidworks 进行 3D 实体建模的基本概念并掌握和运用后文中的 14 条技巧,都可为构建极富获奖竞争力的复杂、创新性机器人设计奠定基础。
技巧 1 – 利用 web 数据库中的模型。
不管是为了生产还是竞赛,对于机器人设计来说,时间都是一项重要因素。他山之石,可以攻玉,构建自己的机器人设计系统模型的最高效方法之一就是从在线设计数据库中获取 3D 模型。3DContentCentral (www.3dcontentcentral.com) 是一个基于 web 的设计数据库,它包含领先制造商提供的数以百万计的零部件,文件格式多种多样。您可以下载气动系统、马达、齿轮以及几乎您可想到的任何机械和电气零部件的精确 CAD 模型。文件格式包括 SolidWorks、IGES、Inventor®、Pro/ENGINEER®、STEP 和 DWG 等等。例如,您可根据所需的冲程、压强、力和各种选项来配置并下载 SMC 气缸模型。又如,您在 VEX 机器人竞赛中无需自行构建轮子模型,而可以从 3DContentCentral 获取模型文件。用户数据库区域以七种语言提供,并包括全球设计用户群提供的共享模型。

技巧 2 – 理解零件方位。
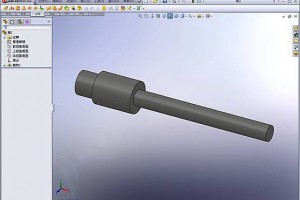
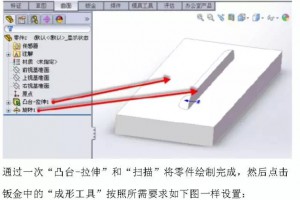
零件由特征构成,特征在草图中建立。为了理解零件在空间中的方位,您必须理解前基准面、上基准面和右基准面的位置。一旦选定了草图平面,即确定了零件方位。例如,图中的 VEX 轴在前基准面中由一个 2D 方形草图构成,如果选择右基准面或上基准面作为草图平面,则图形窗口中的零件方位均会不同。
前基准面
右基准面
上基准面
草图平面确定了方位。
技巧 3 – 在草图中使用对称。
矩形草图工具用于创建 VEX 轴的轮廓。在机器人设计中,您会希望零件具有对称性。原点代表前基准面、上基准面和右基准面的交点。简单的矩形草图可从原点开始绘制,但是,如果您将原点置于草图中心,则草图将保持关于上基准面和右基准面对称。在矩形的两个顶点间连接一条辅助线,并在原点和该中心线间建立中点关系,将可确保矩形始终对称。
技巧 4 – 在标注尺寸前插入几何关系。
在 SolidWorks 软件中,草图实体和模型几何体之间的关系对于定义行为并在 2D 和 3D 草图中保持设计意图非常重要。几何关系(水平、竖直、平行、垂直、相等、同心、共线、等径、相切和固定)用于约束各个草图实体并与现有的面、边和参考几何体形成关系。矩形草图工具包含两项平行关系和两项垂直关系。中心线用于与原点形成中点关系。因为 VEX 轴是由方形铝锭制成的,所以通过相等关系来代表物理形状。如果要更改铝锭尺寸,则使用一个尺寸来控制方形草图的总体尺寸。小写符号用于表示关系,您可通过选择 View(视图)> Sketch Relations(草图关系)来显示这些符号。对于机加工零件,软件会将这些零件显示为黑色,您应该为这些零件彻底定义草图。将尺寸放在轮廓外可节省在 2D 工程图中放置尺寸的步骤。
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号