
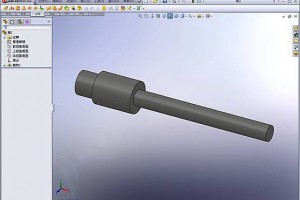
Physical Simulation(物理模拟)可用于在机器人装配体上模拟马达、弹簧和重力的效果。“物理模拟”会综合模拟元素与 SolidWorks 工具(例如 Mates(配合)和 Physical Dynamics(物理动力学))来移动装配体中的部件。“物理动力学”有助于根据机器人手臂接触的部件来确定其运动范围。受牵引约束的部件受到碰撞后,会在其自由度范围内旋转或者沿受约束或受部分约束的部件滑动。您可使用“物理模拟”的结果来为装配体中的每个零件自动设置载荷条件和边界条件,以用于进行 COSMOSXpress 分析。
VEX 轴的运动取决于马达或其它驱动装置的旋转,且运动是动态进行的。为了模拟此运动,请向 VEX 轴应用 Rotary Motor Physical Simulation(旋转马达物理模拟)工具。若要确定手臂会在哪里与其它部件碰撞,可使用碰撞检测功能。当部件碰撞时,碰撞面会变成绿色。

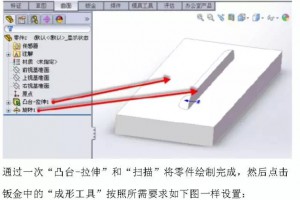
技巧 11 – 测试干涉情况和易维护性
在加工零件前,您可通过干涉检测来测试装配体中部件间的干涉情况,这样既省时又省力。干涉检测可用于快速分析干涉情况,还具有忽略特定干涉以及检测或忽略重合曲面的功能。通过碰撞检测,可确定装配体的部件移动和旋转时装配体的运动范围。通过分解图动画,有助于确定机器人设计是否易于装配或拆解。当您制作分解图时,请想想如何拆解机器人。当进行分解图动画演示时,模拟过程会显示如何拆解机器人。另外,别忘了考虑紧固件,现场维修机器人时,需要操作紧固件。请将所有的紧固件、螺钉、螺母和螺栓合并到通用配件文件夹中,您可选择显示或隐藏该文件夹。
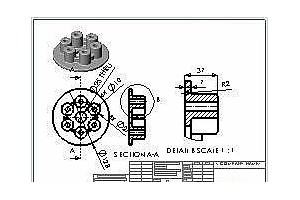
技巧 12 – 在工程图中使用配置和属性。
工程图包含用于记录零件或装配体的信息。您可将在零件图或装配图中定义的配置和属性插入到工程图中。例如,VEX 轴采用 6061 铝合金,该零件在相应的工程图中包含三种配置,材料 6061 铝合金会自动出现在标题栏中。您还可以将在零件图中标注的公差信息传递到工程图中。
技巧 13 – 尽早共享您的设计并进行协作。
可采用 eDrawings® 交流、发布和查看软件在设计早期与数量不限的人员通过电子邮件协作并获取反馈。任何人无需额外购买软件即可查看、标注和测量准确的 2D 和 3D 模型图。您的供应商、营销人员、采购代理和队友都可在设计早期帮您识别潜在问题。
技巧 14 – 重复利用现有数据。
使用 DWGeditor& #8482;,您可采用原始格式来编辑和维护现有的 2D 数据。例如,有人创建了一个带圆孔的齿轮轮廓,其文件格式是 DWG。现在您希望使用相同的齿轮轮廓来制作 3D 齿轮模型,但想为 VEX 轴开一个方形切口,即可重复利用 DWG 文件中的一部分或某些 3D 特征和草图来创建新设计,这样可节省设计时间。
若需关于这些机器人设计技巧的更多信息,请观看 www.solidworks.com/vex 上的电影文件。The Fundamentals of SolidWorks(《SolidWorks 基础》,由 SDC 出版)包含关于 VEXplorer 的更多建模实例。
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号