
1 机械手的三维建模
机械手是由上承梁、下承梁、背杆、主撑、伸长臂、三联板、铲臂爪臂、二级拉杆和液压缸等零部件组成。机械手的三维建模包括所有零部件的三维建模以及虚拟样机的装配。对机械手进行建模采用自底向上的方式进行,即先依据相关零部件的结构和尺寸建立起三维模型,再利用Solidworks的装配体建模,按照各零部件之间的装配以及约束关系逐个进行组装,最后建立虚拟样机。对零部件的精确建模以及相关配合关系的了解是成功建立虚拟样机的关键。
1.1 机械手零部件的三维建模
Solidworks零部件的建模过程为:首先选取合适的基准面,建立各零部件的平面草图;其次利用拉伸、特征扫描、旋转、切除、放样等命令完成零件的基本特征的造型;然后利用倒角、圆角等命令完成局部的造型,最后完成整个零件的建模。
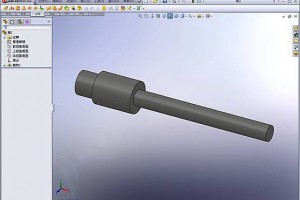
建立该机械手模型的过程中,遇到了不少困难,下面结合实际提出几点三维建模的技巧和应该注意的问题。有些零部件特征相当的复杂,例如铲臂爪臂的建模。因为它的主体特征是一个比较复杂的曲面,所以需要熟练曲面建模的命令。曲面建模通过带控制线的扫描曲面、放样曲面、边界曲面以及拖动可控制的相关操作可产生非常复杂的曲面,并可以直观地对已存在曲面进行修剪、延伸、缝合和圆角等操作。其次在建立上承梁、下承梁、背杆等零件基本运用拉伸切除等命令。再次画截面草图时,一些已生成的特征,可以通过实体转换命令获得需要利用的图线.草图的建立也可以快速准确形成。当草图中含有较多的对称特征时,先绘制一个特征,通过镜像工具、阵列命令生成对称的特征,从而达到高效绘制草图的效果。选择合适的特征生成方法也相当重要。一般情况下,相对拉伸.旋转和扫描更能高效生成模型;排列、镜像比逐个生成更快捷,选择合理的特征方法对于复杂零件就娩的尤为重要了。最后,零件的保存应该注意,把建好的零件保存在一个文件夹,便于快速查找修改。熟练地掌握建模的技巧,对于模型的精确高效建立、整个虚拟样机的装配、运动学分析具有重要意义。最终建立的各零部件如图1所示。

图1 机械手零部件图
1.机座或上承梁 2.背杆或旋转杆 3.主撑或驱动杆 4.滑环体或下承梁 5.伸长臂或爪臂 6.号联板 7.二级拉杆、连杆2 8.铲臂爪臂2
1.2 机械手的装配
Solidworks提供了强大的装配功能,其优点为:(1)在装配体环境下,可以方便地设计及修改零部件;(2)可以动态观察整个装配体中的所有运动,可以对运动的零部件进行动态干涉检查及间隙检测;(3)可以通过镜像、阵列零部件,设计创建出新的零部件及装配体。在机械手的装配过程中,首先插入的零部件会自动定义为固定静止的部件,然后依次插入各零部件,通过一系列的配合约束关系,装配成整机。装配前,应该认真分析各零件、部件在部件、整机中的位置、作用、以及相关的装配关系、运动关系,以保证装配运动的灵活性、不干涉性。下面通过机械手的装配过程,说明在Solidworks中的装配体生成方法:(1)打开新建装配体命令,即进入生成装配体的界面;(2)在装配体界面中,点击“插入零部件”命令,依次如图1所示,排列各零部件,顺序按照从上到下排列。注意插入的零部件应该集中在一个区域,不要过于分散,以便于下一步装配步骤。(3)装配时,将所有的零部件通过“重合”、“平行”、“垂直”、“距离”、“同轴心”等配合约束装配起来。装配好具有对称特征的一边零部件后,运用圆周阵列特征命令,以上承梁也就是基座中心轴线为中心生成剩下的对称部分。装配时,要运用“移动零部件”、“旋转零部件”将零件拖动到便于配合的合适位置。装配时应该注意做干涉检查,消除装配干涉。最后装配成的虚拟样机如图2所示。
图2 机械手装配图
2 机械手运动仿真
2.1 动力学的基本原理
机构在空间的运动包括平移、旋转或2种运动的合成。运动学基本理论运用旋转平移矩阵来描述其运动情况,这个矩阵是一个4×4矩阵
其中Rdde是一个3×3矩阵,它描述了机构的旋转运动,Rtron是一个3×1矩阵,用来描述机构的平移运动。
2.1.1 坐标系旋转变换
机构绕空间任意轴u旋转,假设旋转角度为φ,那么旋转矩阵可表示为
式中,ux、uy、uz分别为空间任意轴u的3个方向余弦,且
在Solidworks中构件绕一坐标轴旋转容易实现,而绕任意轴旋转,需要根据旋转变换矩阵,通过一系列变化,使构件旋转所绕的坐标轴与空间任意轴重合。其具体方法:以构件绕平面坐标系x轴旋转变换为空间任意轴v轴为例,如图3所示,其中坐标系x-y-z为固定坐标系,x'-y'-z'为动坐标系。v轴式已知的,找一个与v轴相垂直的向量n,使它绕z轴旋转,与v轴重合:那么x轴同样绕向量n旋转相同角度,从而得到x';再将v轴与x'叉乘,得到y'轴,就得到了动坐标系x'-y'-z',从而实现了绕v轴的旋转运动。构件绕其他坐标轴旋转的情况可以通过同样的转换得到。
2.1.2 坐标系平移变换
机构平移时,其平移矩阵为
式中
x、y、z是构件坐标原点在固定坐标系的坐标,而X、Y、Z为构件坐标原点在动坐标系中的坐标,li、mi、ni(i=1,2,3)分别为动坐标系3个坐标轴的方向余弦。
2.1.3 机构动力学的动态静力分析原理
根据达朗贝尔原理,将惯性力计入静力平衡方程,求出为平衡静载荷和动载荷而需在原动构件上施加的力或力矩,以及各运动副中的反作用力,这种分析方法称为动态静力分析。进行动态静力分析时,先要进行运动分析。求出相应的杆件加速度、角加速度、速度和角速度等。如果已知机构的运动状态和工作阻力,运用此方法求解平衡力矩和各运动副中的反力,以及它们的变化规律。
平面机构某一构件在某一位置的力平衡方程可以这样来计算。在铰链i-1处构件l与前一个构件I-l相连,在铰链i处与下一构件I+l相连。在铰链i处,构件受到的约束反力为-FRi-1。同理,在铰链i-1处,构件受到约束反力FRi-1。在铰链i-1处受到约束反力为-FRi-1。作用于构件I上的所有外力和外力矩(对于原动件,不包括未知的平衡力矩)向质心简化,可以得到一个合力FI和力矩MI,则构件I矢量形式的力和力矩平衡方程为
式中ml、Jl——构件的质量和对质心的转动惯量;
..
sl——质心的加速度矢量;
..
φl——加速矢量;
pl、gl——从质心至铰链i和i-1的矢量。
如果已知运动规律,即可以求出各运动副约束力、作用于原动件上的平衡力矩等。
2.2 机械手的运动仿真实现
COSMOSMotion插件是一个集成在Solidworks中的运动分析和仿真模块,其操作简单,容易掌握,给工程师们设计分析带来了巨大的便利。COSMOSMotion可以对复杂机械系统进行完整的运动学仿真和动态静力学分析。若将其仿真得到的大量机械系统运动及动力学参数(诸如每个零部件的约束力曲线、加速度曲线、系统平衡力矩曲线等),运用Excel电子表格进行处理就可以建立起机械系统的动力学模型,求解出机械系统在稳定运转阶段的真实运动规律。
仿真的基本步骤为:用Solidworks对零件进行三维造型、装配,然后转到COSMOSMotion,装配约束将自动转化为仿真模型的约束,添加必要的驱动力、工作阻力,建立仿真模型就可以模拟机械运行状况,对机械进行动力与运动分析。机械手的约束基本为旋转约束,另外有下承梁的垂直平移运动。这些运动都是通过一个液压缸来实现。液压缸活塞杆通过上下垂直运动,驱动液压缸活塞杆安装盘作相应的平移运动,从而带动主撑杆或驱动杆的平移和旋转运动。仿真时,以上承梁为固定部件,其他部件为活动部件。模拟的过程采用简化模型,液压缸的作用起一个传力作用.在模拟过程中将液压缸省去,代替作用于上承梁的力驱动。
当液压缸的活塞杆向下移动时,抓爪执行闭合的操作。当液压缸的活塞杆向上移动时,抓爪执行打开的操作。抓取接触过程中,固紧物体和铲臂指尖的相互作用力构成一对约束反力,力学上它随液压缸中的油压不同而变化,也随固紧物体自身刚度的强弱和接触性质而变化。假设在抓取过程中,不考虑固紧物体的可人性即固紧物体不因铲臂指尖的接触而产生挤压和切人破坏,固紧物体与铲臂指尖产生完全的紧密接触,这在力学上用同端约束条件加以处理。
本文中研究铲臂指尖相距200mm时,抓爪背杆承受的约束力随时间的变化关系。液压缸提供的驱动力从0逐步加大直到200kN,200kN工程上即相当于20t的力。计算中共取200个迭代次数,即大约相当于每一步长(或每0.1s)增加1kN左右的力,进行迭代计算,从而求出抓爪背杆承受的约束力随时间的变化关系。机械手约束处理图如图4所示,驱动力的仿真图线如图5所示。
加入驱动力后,运行motion命令,从而完成运动仿真计算。计算完成后依次生成背杆约束处的约束力,如图6所示。
图6 右边背杆与上承粱垂直方向约束力随时间变化曲缎
图7 右边背杆与驱动杆垂直方向约束力随时间变化曲线
图8 右边背杆运动副垂直方向约束力随时间变化曲线
图6、图7和图8依次表示右边背杆与上承梁的旋转约束、驱动杆旋转约束、三联板旋转约束垂直方向力随液压驱动力变化的曲线图。从图示可以看出背杆的垂直方向受力在任意时间保持平衡。同样可以得到其他方向的背杆受力图以及其他零部件的约束力图线。进行其他位置约束时,同样可以得到其他位置处零部件的约束力图线,这些可作为进一步机械手强度设计的输入数据。
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号