

图3 小车架的模块划分图
分页
1.2 小车架的参数化驱动
模块化研究的结果是将按照产品的功能与结构将产品分解成一个个功能模块,但是这些功能模块是静态的,而产品设计中需要将这些功能模块进行必要的变异,以产生新的模块,参数化技术就是利用CAD 技术,将产品的功能模块进行变异,产生新的模块,从而使功能模块由静态向动态转变,达到创新设计的目的,对于小车架而言,参数化驱动主要分三个步骤来进行:首先是对各功能模块进行参数化定义,然后对其进行变参,产生新的功能模块(功能模块的参数化模型)。
(1)功能模块的参数化定义。对于给定形状的零件,它的拓扑结构不变,变化的主要是它的尺寸参数。因此建立相同结构不同尺寸的参数化零件,我们只要实现相关参数联动即可。即使仅仅考虑零件的尺寸参数,忽略其它的参数,这类参数还是数量大,关系复杂,必须根据区分出的各个特征,确定主约束参数和次约束参数。然后提取主约束参数,建立主约束参数与次约束参数之间的关系。主约束参数确定有两个原则。是必须保证参数化特征的所有次约束参数都可以直接或间接地和主约束参数发生联系;二是设计的目标要求以及决定设计的一些关键参数应该作为主约束参数。在每个特征部分将参数分为三类:①主参数。决定零件装配约束或形状结构的参数。参数之间是相互独立的,由设计者或者应用计算程序确定其值;②次参数。其值由主参数决定。主参数确定以后,根据参数关系表达式确定次参数。这类参数不能人工进行改变;③常数。这类参数是设计中其它关系表达式要用到的一些常数,将它们也作为一种固定参数表达式列出。
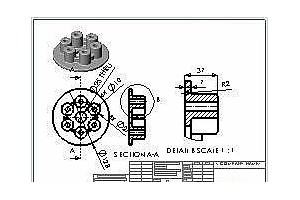
现取小车架上的一个模块卷筒支承座为例进行说明,如图4所示。首先根据它的特征,确定主约束参数,即L,W,H,T1,T2,T3,X1,X2和X3另外根据各个零件间的拓扑关系,利用参数关系表达式,来确定次参数。如零件1的长宽高特征参数分别为:L,W,T3;零件2的长宽高特征参数分别为L,H-T3,T2;零件3的长宽高特征参数分别为:W-X3-T2,T1,H-T3;零件4的长宽高特征参数分别为:X3,T1,H-T3;零件3的相对坐标是:X1+T1;零件4的相对坐标:X1+T1+X2+T1。
图4 卷筒支承座的参数划分简图
(2)功能模块的参数化模型建立。在本系统中,主要采用的是参数修改法,即在SolidWorks中,利用已有的模型,通过修改模型参数的方法得到需要的新模型。用此方法建立参数化模型,必须有模型库的支持,模型库通常是由用户事先用手工方式建立,保存在程序指定的目录下。需要使用时,从模型库中打开模型文件,对指定的尺寸参数进行修改,重建,就可以获得满足需要的模型。
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号