
蔬菜嫁接机夹苗机械手机构设计仿真,让我们看看以下,中国工业协会唯一指定模具设计基地---科技,将为您作详细的介绍。
黄瓜是北方的主要蔬菜产品之一。黄瓜生产主要利用黄瓜与南瓜的嫁接苗,以增强抗病性、提高产量和土地利用率等。嫁接是一项高产、高效、切实可行的生产技术,但同时又是一项时间紧迫、作业量大的工作。人工嫁接操作复杂、耗费工时,而且每个人嫁接水平不一,很难保证较高的成活率。因此,设计了蔬菜嫁接机,以满足生产的需要。
夹苗机械手是嫁接机的重要部件,直接影响嫁接机的工作速率和嫁接的成功率。笔者通过机构设计和计算机分析,设计了夹苗机械手。
1 机械手动作分析
设计的蔬菜嫁接机,要求砧木和穗木夹苗机械手在喂苗位置张开,分别喂入苗后,机械手闭合;之后机械手在动盘带动下转动90°,到切削位置停止,由切削装置分别切削砧木和穗木;之后在动盘带动下再次转动90°,到嫁接位置,砧木苗和穗木苗贴合,由送夹机构送来的秧夹夹住贴合后的秧苗,然后机械手张开,使完成嫁接的秧苗下落。
因此,对嫁接机械手的工艺要求是在喂苗位置,机械手张开,保证轻松喂苗,并且要保证苗的定位方向符合贴接法对秧苗切削的要求;在落苗位置,要保证秧苗的落苗空间,避免秧苗卡在机械手上。
2 机械手设计
2.1机构设计
根据嫁接工艺对机械手动作的要求,通过对多种机构的对比,决定采用图1所示的机构。工作时,在喂苗和落苗位置,由气缸推动推杆AE,带动外指AC向外运动,内指BD在连杆AB的带动下绕回转点E转动,使内、外指夹苗点C和D张开;内、外指的闭合由拉伸螺旋弹簧拉力的作用来实现。

2.2机构尺寸确定
由贴接法嫁接工艺可知,贴接后保证顺利落苗是确定机构尺寸的主要依据。黄瓜苗的最大叶片跨度为73.0 mm,平均65.1 mm,平均宽度23.5 mm,南瓜苗的最大叶片跨度为107. 0mm,平均87.4 mm,平均宽度37.3 mm。由于该机构机械手张开时内指是转动的,并且叶片具有较大的柔性和弹性,加上重力的作用,贴合后的秧苗较易于下落。因此,初步确定连杆AB长24 mm,外指AC长25 mm,内指BD长45 mm,推杆AE长75 mm。分页
3机械手建模与动态仿真分析
3.1机械手建模
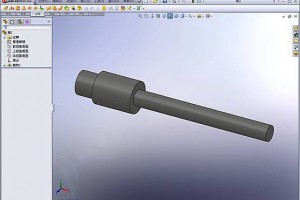
将初步确定尺寸的机构各件用SolidWorks建立模型,然后将其装配。并对部分尺寸进行修正,得机械手三维图,如图2所示。
机械手夹持孔依据测得的秧苗茎杆平均尺寸确定。据测定,黄瓜苗横向1. 72 mm,纵向1.76 mm,南瓜苗横向2.73 mm,纵向3.79 mm,因而确定穗木夹持孔为半径1.7 mm圆孔,砧木夹持孔为长3.8mm、宽2.7mm的矩形孔。另外,在夹持爪内侧与苗接触部分加装弹性好、表面粗糙的橡胶材料,以夹紧秧苗,这样并不影响嫁接秧苗的成活率。这是因为有研究表明,压缩变形小于20%时,对秧苗的成活率影响非常小。
3.2机械手动态仿直与分析
为了检验机械手的动作和运动情况,用SolidWorks软件的COSMOSMotion插件对其进行动态分析,仿真时不考虑销轴的影响,销轴联接的两个部件间直接定义为旋转副。
3.2.1定义约束和载荷。弹簧座板和掌板固定于地,连杆和内指、连杆和推杆、内指和掌板定义旋转副,推杆和掌板定义平移副。弹簧座板和推杆之间定义线性弹簧,弹簧刚度6.629 N·mm,长度20 mm,直径4 mm,丝径1 mm。在推杆上施加一个30 N的力,力的方向沿推杆。
3.2.2进行干涉检查和仿真。单击菜单"运动"~"干涉检查"选择机械手整个模型进行干涉检查,经检查机械手各件间不存在干涉。然后,单击菜单"运动"~"智能构建器"~"仿真",设置仿真"持续时间"为0.1 s,"帧的数目"为500,进行仿真,并将其运动过程制成AVI格式的动画演示结果表明,各机构部件的动作符合设计要求。
3.2.3仿真与结果的输出。为了确定秧苗夹持点的运动和落苗空间,跟踪内外指夹苗点轨迹并将其"输出CSV",用Excel将数据文件打开,并将数据传人Matlab,绘制出轨迹曲线如图3,4。
从内外指夹苗点轨迹可见,外指最大位移9 mm,内指塌大位移7 mm,喂入苗的空间是它们的和16 mm,不仅可以保证苗的喂入,同时也应满足苗嫁接完成后下落的需要。
4结论
根据嫁接机的总体工艺要求和嫁接用黄瓜苗、南瓜苗跳物理机械性质,设计了嫁接机械手的结构,并用SolidWorks软件建模,用COSMOSMotion插件进行了动态仿真分析,证明该机构及动作可满足设计要求。
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号