


毕业设计:自动送料机械手
本课题的内容和要求
(一、)原始数据及资料
(1、)原始数据:
a、生产纲领:100000件(两班制生产)
b、自由度(四个自由度)
臂转动180
臂上下运动 500mm
臂伸长(收缩)500mm
手部转动 ±180
(2、)设计要求:
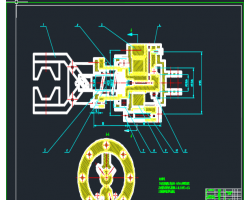
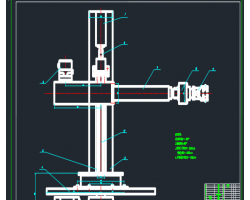
a、上料机械手结构设计图、装配图、各主要零件图(一套)
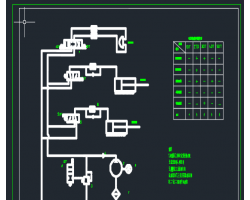
b、车床自动送料机械手液压原理图(一张)
c、机床上下料机械手设计计算说明书(一份)
(3、)技术要求
主要参数的确定:
a、坐标形式:直角坐标系
b、臂的运动行程:伸缩运动500mm,回转运动180。
c、运动速度:使生产率满足生产纲领的要求即可。
d、控制方式:起止设定位置。
e、定位精度:±0.5mm。
f、手指握力:392N
g、驱动方式:液压驱动。


 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号