
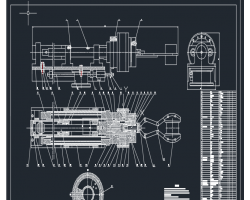
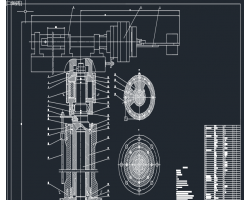
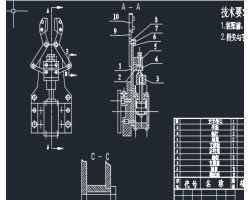


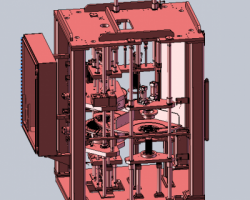
XXX大学毕业设计(论文)液压控制、圆柱坐标工业机械手论文。图纸内还有2张装配图、8张零件图、整体液压控制系统图、整体PLC控制系统图和一份设计计算说明书。
题目: 工业机械手设计计算书
专业:13级机械设计制造及其自动化
目 录
摘要 …………………………………………………………………………………1
1绪论 …………………………………………………………………………………… 1
1.1 研究目的及意义…………………………………………………………………1
1.2 本课题研究内容 ……………………………………………………………… 2
2机械手的总体设计 ……………………………………………………… 3
2.1 工业机械手的组成 …………………………………………………………… 3
2.1.1 执行机构 …………………………………………………………………… 3
2.1.2 驱动机构 …………………………………………………………………… 4
2.1.3 控制系统 …………………………………………………………………… 4
2.2 关节型机械手的主要技术参数 ………………………………………… 4
2.3 圆柱坐标式机械手运动简图………………………………………………5
3关节型机械手机械系统设计 ……………………………………………6
3.1 手部 ………………………………………………………………………6
3.1.1 夹紧力的计算 ……………………………………………………6
3.1.2 夹紧缸驱动力计算 ………………………………………………7
3.1.3 两支点回转型手指的夹持误差分析与计算 ……………………8
3.1.4 夹紧缸的计算 ……………………………………………………10
3.2 腕部 ………………………………………………………………………11
3.2.1 腕部设计的基本要求 ……………………………………………11
3.2.2 腕部回转力矩的计算 ……………………………………………12
3.2.3 手腕回转缸的设计计算 …………………………………………14
3.3 臂部 ………………………………………………………………………15
3.3.1 手臂伸缩液压缸 …………………………………………………15
3.3.2 手臂回转液压缸 …………………………………………………23
4机械手的液压驱动系统 …………………………………………………27
4.1 程序控制机械手的液压系统 ……………………………………………27
4.2 液压系统 …………………………………………………………………27
4.2.1 各液压缸的换压回路 ……………………………………………27
4.2.2 调速方案 …………………………………………………………28
4.2.3 减速缓冲回路 ……………………………………………………29
4.3 液压系统的合成 …………………………………………………………29
5机械手的可编程控制 ……………………………………………………31
5.1 输入输出触点的分配 ……………………………………………………31
5.1.1 行程开关的分配 …………………………………………………31
5.1.2 手动按钮的分配 …………………………………………………31
5.1.3 输入输出继电器的分配 …………………………………………32
5.2 外部接线图 ………………………………………………………………32
5.3 控制面板设计 ……………………………………………………………33
5.4 状态控制图 ………………………………………………………………34
5.5 梯形图 ……………………………………………………………………35
结论 …………………………………………………………………………………… 37
致谢 …………………………………………………………………………………38
参考文献 ……………………………………………………………………………39




 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号