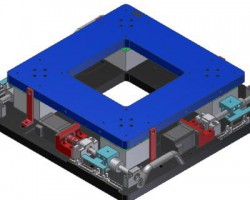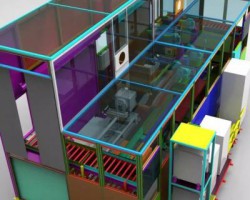
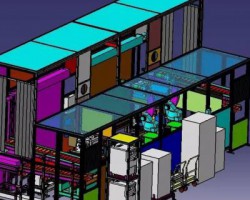
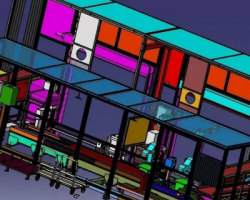


双机器人双夹具弧焊工作站总装设计 包含CATIA建模的零部件和装配图、以及STP文件及BIP渲染图文件。双机器人双夹具弧焊工作站总装设计),两个工作站交叉进行,使机器人焊接时间与工件上、下料时间同步,这种方式可以节约变位器旋转时间。双夹具滑轨形式的焊接机器人系统,可利用两副滑轨轮流为焊接机器人送料,夹具由变位机进行变位来实现机器人焊枪不同位置的焊接。
双机器人双夹具弧焊工作站总装设计 包含CATIA建模的零部件和装配图、以及STP文件及BIP渲染图文件。双机器人双夹具弧焊工作站总装设计),两个工作站交叉进行,使机器人焊接时间与工件上、下料时间同步,这种方式可以节约变位器旋转时间。双夹具滑轨形式的焊接机器人系统,可利用两副滑轨轮流为焊接机器人送料,夹具由变位机进行变位来实现机器人焊枪不同位置的焊接。
|
您还没有登录,请登录后查看详情
|
本网页所展示的信息由会员自行提供并对其真实性、准确性和合法性负责,本平台(本网站)仅提供展示服务,本平台采用积分下载机制,初心为免费下载,因租用下载服务器价格昂贵,为此我们使用积分下载机制,你所购买的并不是模型的费用,而是模型下载流量费,免费下载可以网站发布信息及推广网站赚取积分,下载前请知晓和理解,对此本平台(本网站)不承担任何模型技术责任,如模型有问题,我们会及时退回积分!
在您的合法权益收到侵害时,欢迎您向admin@ecmould.com邮箱发送邮件,或 【网站留言】 我们将竭诚为您服务,感谢您对中模在线网的关注与支持!
© 2008-2023 中模网络设计工作室 版权所有,并保留所有权利。
浙江省余姚市 ICP备案证书号: 浙ICP备16021499号
 浙公网安备: 33028102000314号
浙公网安备: 33028102000314号